MicroPython plačiai naudojamas su mikrovaldikliais ir įterptosiomis sistemomis. Galime įrašyti kodą ir bibliotekas MicroPython IDE viduje ir susieti kelis jutiklius. Šis užrašas padės jums išmatuoti atstumą naudojant ESP32 su HC-SR04 jutikliu.
ESP32 su HC-SR04 ultragarsiniu jutikliu naudojant MicroPython
Norint susieti ESP32 su ultragarsu, tereikia prijungti du laidus. Naudodami ultragarsinius jutiklius galime išmatuoti atstumą nuo objekto ir suaktyvinti atsaką, pagrįstą šia sistema, pavyzdžiui, transporto priemonių susidūrimo išvengimo sistemas.

Naudodami MicroPython, kuri yra sukurta ESP32 ir kitų mikrovaldiklių kalba, galime susieti kelis jutiklius, pvz. HC-SR04 . Bus parašytas MicroPython kodas, kuris apskaičiuos laiką, per kurį SONAR banga pasiekia nuo jutiklio iki objekto ir atgal iki objekto. Vėliau, naudodamiesi atstumo formule, galime apskaičiuoti objekto atstumą.
Štai keletas pagrindinių HC-SR04 jutiklio akcentų:
| Charakteristikos | Vertė |
| Darbinė įtampa | 5V DC |
| Veikimo srovė | 15 mA |
| Veikimo dažnis | 40 kHz |
| Mano diapazonas | 2 cm / 1 colio |
| Maksimalus diapazonas | 400 cm / 13 pėdų |
| Tikslumas | 3 mm |
| Matavimo kampas | <15 laipsnių |
HC-SR04 kištukas HC-SR04 yra: keturi smeigtukai:
- Vcc: Prijunkite prie ESP32 Vin kaiščio
- Gnd: Prisijunkite prie GND
- Trig: Kaištis valdymo signalui gauti iš ESP32 plokštės
- Aidas: Siųsti atgal signalą. Mikrovaldiklio plokštė gauna šį signalą, kad apskaičiuotų atstumą pagal laiką

Kaip veikia ultragarsas
Sujungus HC-SR04 jutiklį su ESP32, signalas Trig kaištis bus sukurtas lentoje. Kai signalas bus gautas HC-SR04 jutiklio paleidimo kaištyje, bus sugeneruota ultragarso banga, kuri palieka jutiklį ir atsitrenks į objektą arba kliūties kūną. Po smūgio jis atšoks atgal į objekto paviršių.
Atsispindėjusiai bangai pasiekus atgal į jutiklio priėmimo galą, bus generuojamas signalo impulsas aido kontakte. ESP32 priima aido kaiščio signalą ir apskaičiuoja atstumą tarp objekto ir jutiklio Atstumas-Formulė.

Visas apskaičiuotas atstumas ESP32 kode turėtų būti padalintas iš dviejų, nes iš pradžių gautas atstumas yra lygus bendram atstumui nuo jutiklio iki objekto ir atgal iki jutiklio priėmimo galo. Taigi tikrasis atstumas yra signalas, lygus pusei to atstumo.
Schema
Toliau pateikiama ESP32 sąsajos su ultragarsiniu jutikliu schema:
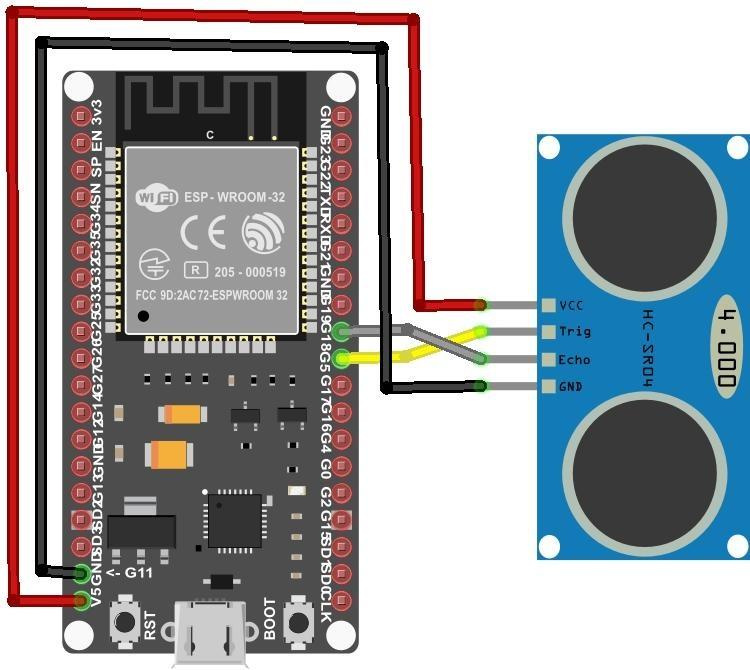
Jutiklio gaiduką ir aido kaištį prijunkite atitinkamai su ESP32 GPIO 5 ir GPIO 18. Taip pat prijunkite ESP32 GND ir Vin kaiščius su jutiklio kaiščiais.
| HC-SR04 ultragarsinis jutiklis | ESP32 kaištis |
| Trig | GPIO 5 |
| Aidas | GPIO 18 |
| GND | GND |
| VCC | ATEITI |
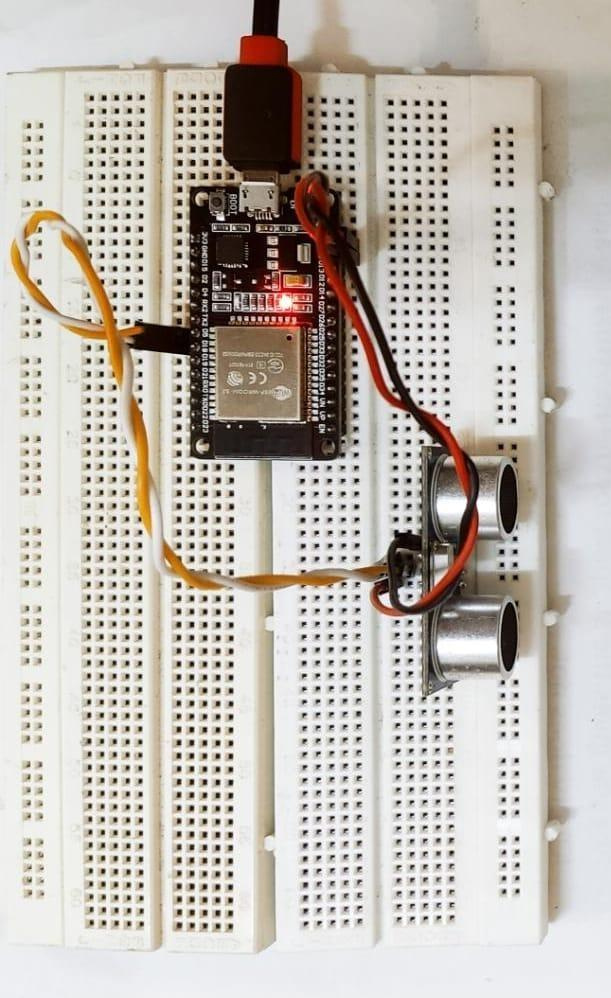
Aparatūra
Norint užprogramuoti ultragarsinį jutiklį, reikalingi šie komponentai:
- ESP32
- HC-SR04
- Bandomoji Lenta
- Jumperių laidai
Kaip nustatyti Ultrasonic HC-SR04 su ESP32 naudojant MicroPython
Kad galėtume programuoti ESP32 su ultragarsiniu jutikliu, turime jame įdiegti biblioteką. Prijunkite ESP32 plokštę prie kompiuterio. Atlikite veiksmus, kad užbaigtumėte ESP32 konfigūraciją su ultragarsiniu jutikliu Thonny IDE naudodami MicroPython.
1 žingsnis: Dabar atidarykite Thonny IDE. Sukurkite naują failą redaktoriaus lange Eiti į : Failas> Naujas arba paspauskite Ctrl + N .
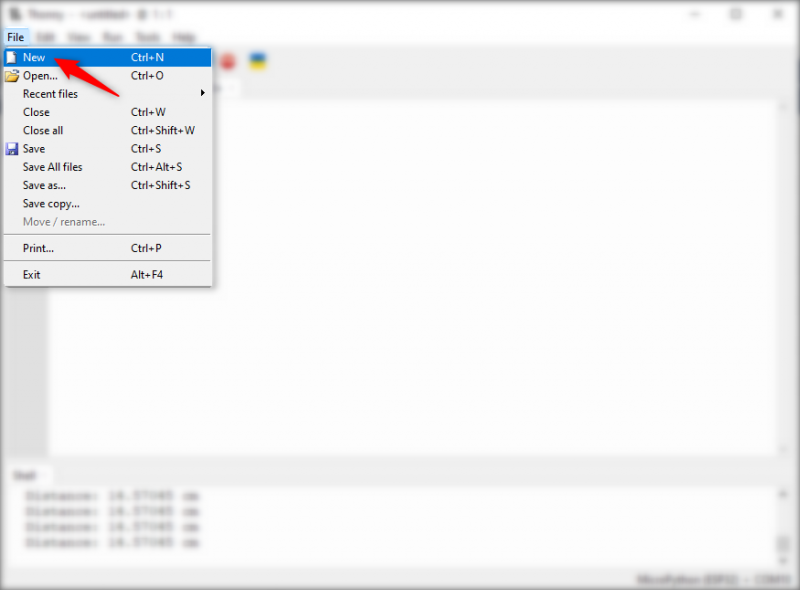
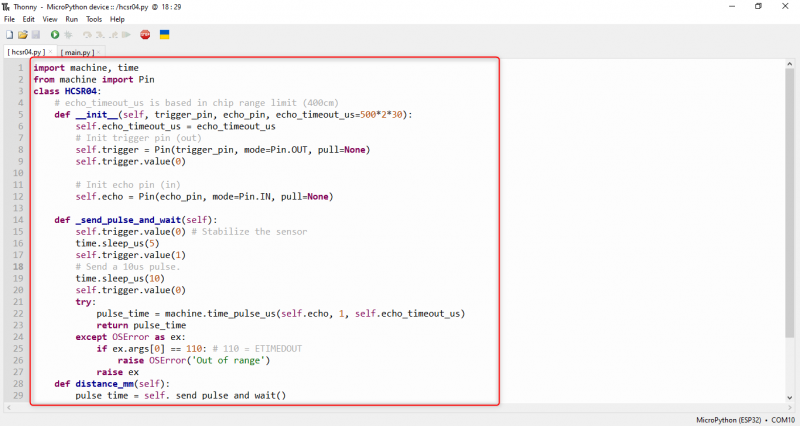
Atidarę naują failą, įklijuokite šį kodą į Thonny IDE redaktoriaus langą.
importuoti mašina , laikasiš mašina importuoti Smeigtukas
klasė HCSR04:
# echo_timeout_us yra pagrįsta lustų diapazono riba (400 cm)
def __karšta__ ( savarankiškai , trigger_pin , echo_pin , echo_timeout_us = 500 * du * 30 ) :
savarankiškai . echo_timeout_us = echo_timeout_us
# Init paleidimo kaištis (išeina)
savarankiškai . paleidiklis = Smeigtukas ( trigger_pin , režimu = Smeigtukas. OUT , traukti = Nė vienas )
savarankiškai . paleidiklis . vertė ( 0 )
# Init echo PIN (in)
savarankiškai . aidas = Smeigtukas ( echo_pin , režimu = Smeigtukas. IN , traukti = Nė vienas )
def _siųsti_pulsą_ir_laukti ( savarankiškai ) :
savarankiškai . paleidiklis . vertė ( 0 ) # Stabilizuokite jutiklį
laikas . sleep_us ( 5 )
savarankiškai . paleidiklis . vertė ( 1 )
# Siųskite 10US impulsą.
laikas . sleep_us ( 10 )
savarankiškai . paleidiklis . vertė ( 0 )
bandyti :
pulso_laikas = mašina. time_pulse_us ( savarankiškai . aidas , 1 , savarankiškai . echo_timeout_us )
grąžinti pulso_laikas
išskyrus OSE klaida kaip pvz.:
jeigu pvz. args [ 0 ] == 110 : # 110 = LAIKAS
pakelti OSE klaida ( 'Nepasiekiamas' )
pakelti pvz
def atstumas_mm ( savarankiškai ) :
pulso_laikas = savarankiškai ._siųsti_pulsą_ir_laukti ( )
mm = pulso_laikas * 100 // 582
grąžinti mm
def atstumas_cm ( savarankiškai ) :
pulso_laikas = savarankiškai ._siųsti_pulsą_ir_laukti ( )
cms = ( pulso_laikas / du ) / 29.1
grąžinti cms
2 žingsnis: Parašius biblioteka kodą redaktoriaus lange, dabar turime jį išsaugoti „MicroPython“ įrenginyje.
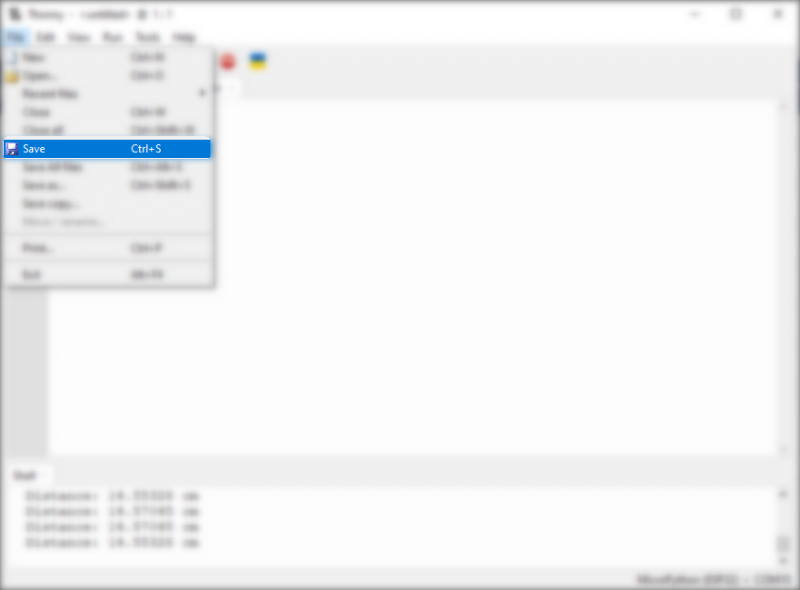
3 veiksmas: Eiti į : Failas> Išsaugoti arba paspauskite Ctrl + S .
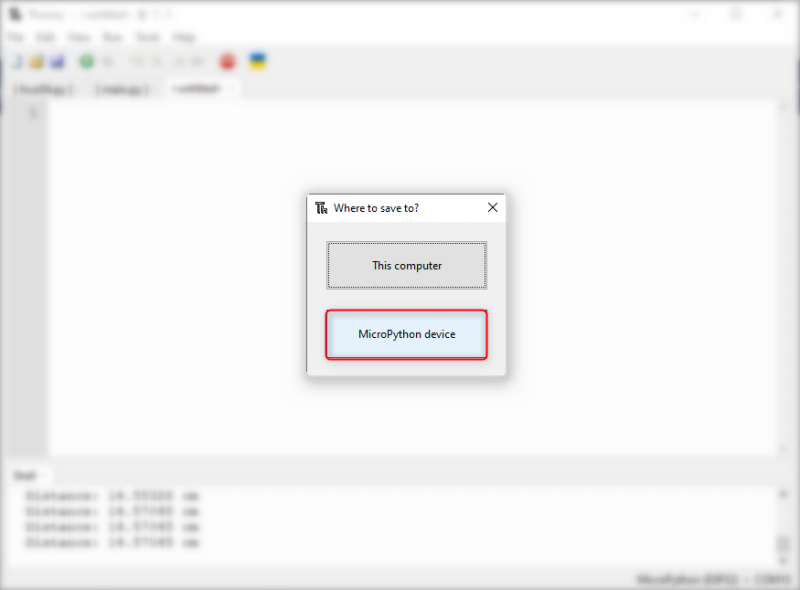
4 veiksmas: Atsiras naujas langas. Įsitikinkite, kad ESP32 yra prijungtas prie kompiuterio. Pasirinkite MicroPython įrenginį, kad išsaugotumėte bibliotekos failą.
5 veiksmas: Išsaugokite ultragarso bibliotekos failą pavadinimu hcsr04.py ir spustelėkite Gerai .

Dabar ultragarso hcsr04 jutiklių biblioteka sėkmingai įtraukta į ESP32 plokštę. Dabar galime iškviesti bibliotekos funkcijas kode, kad išmatuotų atstumą nuo skirtingų objektų.
Ultragarsinio jutiklio kodas naudojant MicroPython
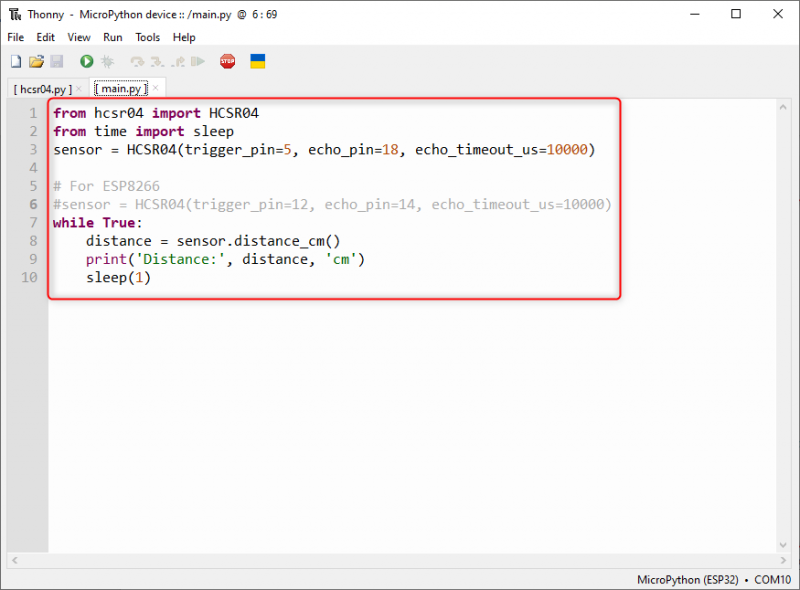
Ultragarso jutiklio kodui sukurti naują failą ( Ctrl + N ). Redagavimo lange įveskite toliau pateiktą kodą ir išsaugokite jį viduje pagrindinis.py arba boot.py failą. Šis kodas atspausdins atstumą iki bet kurio objekto, esančio priešais HC-SR04.
Kodas prasidėjo skambinant į svarbias bibliotekas, tokias kaip HCSR04 ir laikas biblioteka kartu su miegoti duoti vėlavimus.
Tada sukūrėme naują objektą pavadinimu jutiklis . Šis objektas naudoja tris skirtingus argumentus: trigerį, aidą ir skirtąjį laiką. Čia skirtasis laikas apibrėžiamas kaip maksimalus laikas po to, kai jutiklis išeina už diapazono ribų.
jutiklis = HCSR04 ( trigger_pin = 5 , echo_pin = 18 , echo_timeout_us = 10 000 )Norėdami išmatuoti ir išsaugoti atstumą, naujas objektas pavadintas atstumas yra sukurtas. Šis objektas sutaupys atstumą cm.
atstumas = jutiklis. atstumas_cm ( )Parašykite šį kodą, kad gautumėte duomenis mm.
atstumas = jutiklis. atstumas_mm ( )Tada išspausdinome rezultatą „MicroPython IDE“ apvalkale.
spausdinti ( 'Atstumas:' , atstumas , 'cm' )Pabaigoje suteikiamas 1 sekundės uždelsimas.
miegoti ( 1 )Visas kodas pateikiamas žemiau:
iš hcsr04 importuoti HCSR04iš laikas importuoti miegoti
# ESP32
jutiklis = HCSR04 ( trigger_pin = 5 , echo_pin = 18 , echo_timeout_us = 10 000 )
# ESP8266
#sensor = HCSR04(trigger_pin=12, echo_pin=14, echo_timeout_us=10000)
kol Tiesa :
atstumas = jutiklis. atstumas_cm ( )
spausdinti ( 'Atstumas:' , atstumas , 'cm' )
miegoti ( 1 )
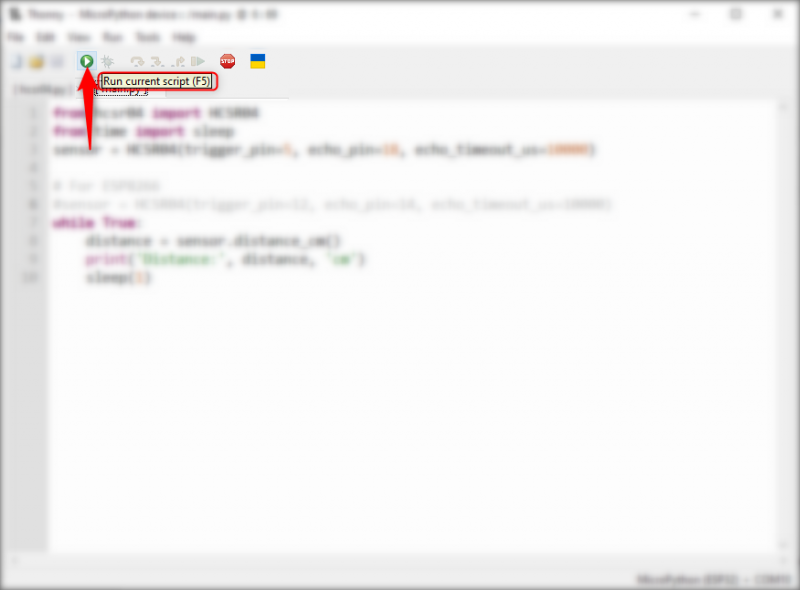
Parašęs ir išsaugojęs kodą MicroPython įrenginyje, dabar paleidžiu ultragarsinį jutiklį pagrindinis.py failo kodas. Spustelėkite paleidimo mygtuką arba paspauskite F5 .
Ultragarsinio jutiklio išėjimas, kai objektas yra šalia
Dabar padėkite objektą šalia ultragarso jutiklio ir patikrinkite išmatuotą atstumą ant Arduino IDE serijinio monitoriaus lange.
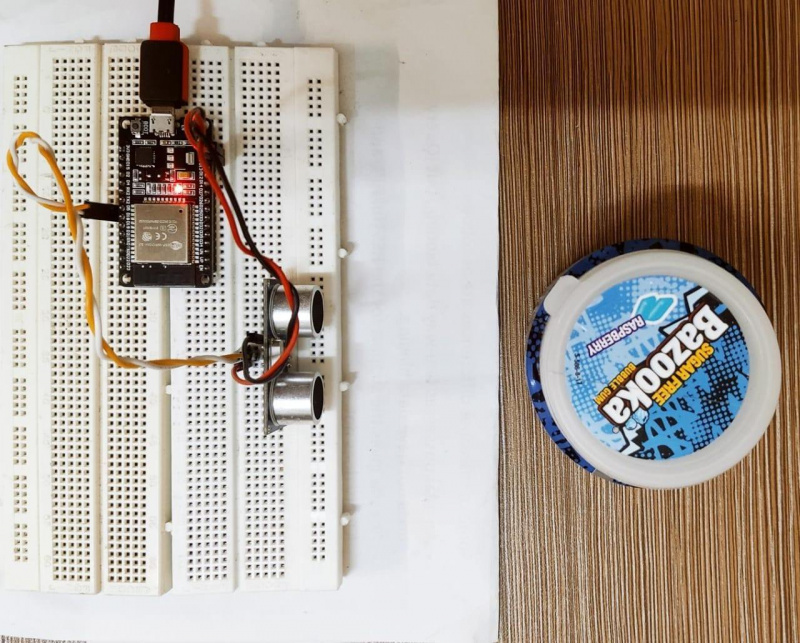
Objekto atstumas rodomas apvalkalo terminale. Dabar objektas yra 5 cm atstumu nuo ultragarso jutiklio.

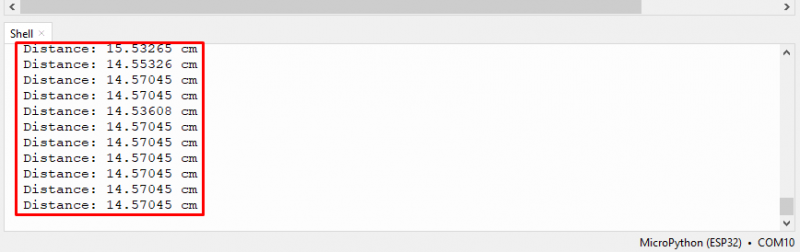
Ultragarsinio jutiklio išvestis, kai objektas yra toli
Dabar norėdami patikrinti rezultatą, mes pastatysime objektus toli nuo jutiklio ir patikrinsime ultragarso jutiklio veikimą. Padėkite objektus, kaip parodyta paveikslėlyje žemiau:
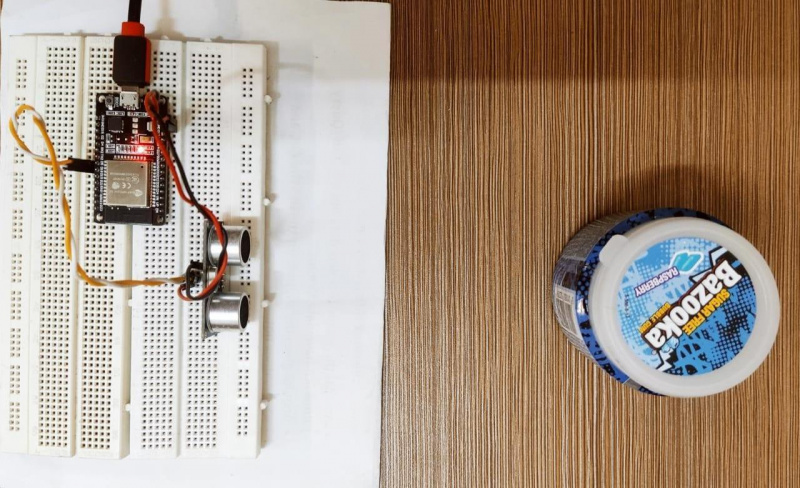
Išvesties langas suteiks mums naują atstumą ir, kaip matome, objektas yra toli nuo jutiklio, todėl išmatuotas atstumas yra apytikslis. 15 cm nuo ultragarsinio jutiklio.
Išvada
Atstumo matavimas yra puikus pritaikymas, kai kalbama apie robotiką ir kitus projektus, yra įvairių atstumo matavimo būdų. HC-SR04 su ESP32 gali išmatuoti atstumą iki skirtingų objektų. Čia šis aprašymas apims visus veiksmus, kurių reikia norint integruoti ir pradėti matuoti atstumą naudojant ESP32.